RADAR, RADARRENDSZER
Dr.
Fekete László főiskolai tanár
Az 1904-ben szabadalmaztatott első radar (Telemobiloskop, Christian Hülsmeyer), majd a lokátorok második világháborús légvédelmi harcaiban játszott pozitív szerepét követő – és napjainkban is folytatódó - fejlődési szakasz eredményeként a radar mára nélkülönözhetetlen eszköznek bizonyul nemcsak katonai alkalmazásokban, de a polgári élet számtalan más területén is. Az 1. ábra összefoglalja, azokat a legfontosabb területeket, amelyeken a radarokat alkalmazzák.
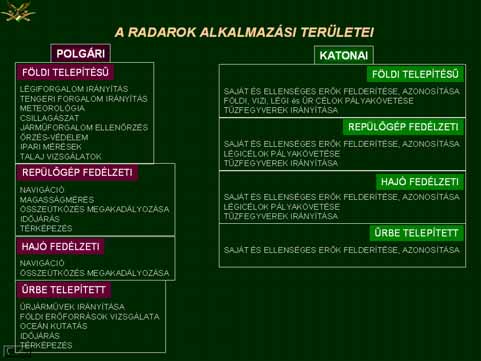
1. ábra
A radar hihetetlen mértékű elterjedését az magyarázza, hogy az egyetlen olyan berendezés, mely képes a tárgyak (objektumok) helyét és egyéb paramétereit nagy távolságról az időjárástól és napszaktól függetlenül meghatározni.
A különböző feladatú radarok felépítése és a jellemző paramétereik természetesen eltérőek, de valamennyi ugyanazon a fizikai elvek alapján működik.
A következő részek bemutatják a radar működésének alapjait (a katonai és polgári életben is leggyakrabban alkalmazott felderítő lokátorok alapján), azokat a legfontosabb jellemzőket, amelyeken keresztül értékelhetjük használhatóságukat, valamint azokat a szempontokat, melyek rendszerbe szervezésük megértéséhez szükségesek.
A RADAR
A radar rádiófrekvenciás jeleket használó berendezés, feladata a tőlünk független tárgyak, objektumok (egyszerű szóhasználattal: célok) felderítése, azonosítása és útvonala paramétereinek meghatározása.
A „RADAR” megnevezés a II. világháború idején keletkezett titkossági megfontolásokból, de mára egyaránt jelöli a műszaki tudományok e szakterületét, de magát a berendezést is. A magyar nyelvben egyaránt elfogadott a latinból származó LOKÁTOR, RÁDIÓLOKÁTOR megnevezés is.
A lokátorok két legfontosabb feladata (felderítés, azonosítás) alapján megkülönböztetünk primer és szekunder radarokat. Mindkét típus működése lényegében azonos elveken, fizika jelenségeken alapul, melyek a következők:
- 1. Az elektromágneses hullámok homogén közegben egyenes vonalban terjednek;
- 2. Az elektromágneses hullámok homogén közegben állandó sebességgel (fénysebesség) haladnak;
- 3. Az inhomogenitások az elektromágneses hullámok egy részét visszaverik, elnyelik;
- 4. Az elektromágneses energia nyalábba koncentrálható, irányítható;
- 5. A
mozgó tárgyakról visszaverődő
elektromágneses hullámok frekvenciája a
tárgy sebességének függvényében
megváltozik (Doppler-elv).
Primer radar
E fizikai jelenségek alapján a primer radar egyszerűsített működési elve a következő:
A radar nagyteljesítményű, rövid idejű, nagyfrekvenciás rádióimpulzust sugároz ki a tér egy meghatározott irányába. Ha a fénysebességgel terjedő hullám útjába valamilyen tárgy kerül (pl. repülőgép, földfelszin, stb.), akkor az a kisugárzott jel egy részét visszaveri. A visszaverődött jelek a céltól kiindulva a tér minden irányába – így a lokátor irányába is – terjednek. A radar veszi a visszavert jeleket és ezekből a cél következő jellemzőit határozhatja meg (2. ábra):
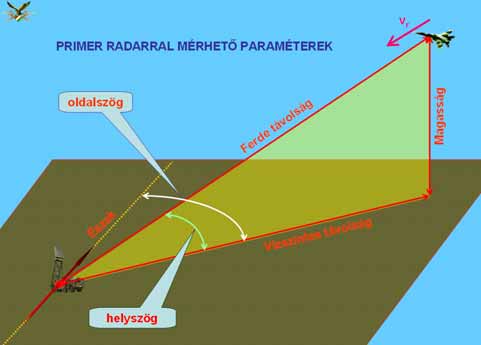
2. ábra
- • A
kutató jel kisugárzási ideje és a
visszavert jel vételi ideje közötti
időkülönbség állandó terjedési
sebesség (c=300 000 km/s) mellett egyértelműen
meghatározza a radar-cél távolságot.(
 )
Ezt nevezzük ferdetávolságnak.
Például: ha a kisugárzás idejéhez
viszonyítva a célról visszaverődött jel 1
milliszekundum (a másodperc ezred része) alatt
érkezik meg, akkor a cél távolsága 150 km.
A távolság maximális értéke a radar
feladatától függően néhányszor 10 km
és több ezer km között változhat. A
légtérellenőrzésben (Légtérellenőrzés: ACC
– Air Command Control) (katonai feladat) és
légiforgalom irányításban (Légiforgalom
irányítás: ATC – Air Traffic Control) (polgári
feladat) alkalmazott lokátorok esetén ez
általában 200…500 km.
)
Ezt nevezzük ferdetávolságnak.
Például: ha a kisugárzás idejéhez
viszonyítva a célról visszaverődött jel 1
milliszekundum (a másodperc ezred része) alatt
érkezik meg, akkor a cél távolsága 150 km.
A távolság maximális értéke a radar
feladatától függően néhányszor 10 km
és több ezer km között változhat. A
légtérellenőrzésben (Légtérellenőrzés: ACC
– Air Command Control) (katonai feladat) és
légiforgalom irányításban (Légiforgalom
irányítás: ATC – Air Traffic Control) (polgári
feladat) alkalmazott lokátorok esetén ez
általában 200…500 km.
- • A ferde távolság vízszintes síkra vetített értéke a vízszintes távolság.
- • Mivel a
rádióhullámokat a tér egy általunk
ismert része felé irányítjuk, mindig
meghatározhatjuk azt az irányt, ahonnan a jelek
visszaérkeznek. Tulajdonképpen így két
irányszöget tudunk mérni:
- o A földrajzi északi irány és a ferdetávolság vízszintes vetülete által közbezárt szöget, melyet oldalszögnek nevezünk. A lokátor körüli tér teljes lefedése esetén ennek maximális értéke 360º.
- o a ferdetávolság és a vízszintes sík által bezárt szöget, melyet helyszögnek nevezünk. A gyakorlatban alkalmazott radarok esetén ennek maximális értéke 20º…40º közötti.
- • A ferdetávolság és a helyszög ismeretében a cél magassága is meghatározható.
- • A mozgó célokról visszavert jelek frekvenciájának megváltozásából meghatározhatjuk a cél mozgási sebességét. Azonban ez nem a cél valódi sebessége. Mérni ennek csak a lokátor irányába mutató összetevőjét tudjuk. Ezt nevezzük radiális sebességnek.
Tehát a primer felderítő radar segítségével megmérhetjük a radar-cél távolságot, az oldalszöget, a magasságot (helyszöget) és a radiális sebességet.
Mielőtt folytatnánk, célszerűnek látszik egy a „szakértők” által terjesztett tévhitet tisztázni: a 3D radar nem azért „3D” mert három van belőle, hanem azért, mert három koordinátát (távolság, oldalszög, magasság) mér, vagyis háromdimenziós. Ezzel szemben a 2D radar csak két koordináta mérésére alkalmas (távolság, oldalszög; vagy távolság, magasság), vagyis kétdimenziós.
Szekunder radar
A szekunder radar működési alapelve lényegében hasonlít a primer radaréra. A döntő különbség közöttük az, hogy a szekunder radar által kisugárzott jel kódolt üzenetet (kérdés) tartalmaz. Amennyiben ezt a kérdést egy megfelelő válaszadóval felszerelt repülőgép veszi és képes a kérdező kód dekódolására, akkor a kérdésnek megfelelő - ugyancsak kódolt - információt (válasz) sugározza vissza. A kérdező radar ezt a választ veszi és dekódolja. Látható tehát, hogy ebben az esetben a radar működése két egymással rádiófrekvenciás jelek útján kapcsolatban álló berendezés (kérdező és válaszadó) együttműködésén alapul. Mivel a szekunder radar a méréshez nem a visszavert jelet, hanem a válaszadó által kisugárzott jelet használja, így ugyanakkora távolság meghatározásához jóval kisebb kérdező jel teljesítmény szükséges.
A szekunder radar a vett válaszjel alapján a következő céljellemzőket határozhatja meg:
- • A kérdező jel kisugárzási ideje és a válaszjel vételi ideje közötti különbség alapján - a primer radarhoz hasonlóan – mérhető a ferde távolság.
- • A kérdező jel kisugárzási (válaszjel vételi) iránya alapján mérhető a cél oldalszöge.
- • A
válaszjelben kódolt információkból
különböző kiegészítő adatokat
határozhatók meg (a válasz tartalma mindig a
kérdésnek felel meg!):
- o Egyedi azonosító kódok;
- o A cél földfelszíntől mért magassága;
- o A cél földfelszínhez viszonyított sebessége;
- o Vészjelzések;
- o Üzemanyag tartalék, stb.
A katonai célokra alkalmazott szekunder lokátorokban a kérdező és válasz kódok a fentieken túl lehetővé teszik a válaszoló gép nemzeti hovatartozásának megállapítását, egyedi azonosítását, és más katonai tevékenységgel összefüggő adatok közlését. Ezeket a lokátorokat a polgári szekunder radaroktól való megkülönböztetés érdekében IFF-nek nevezzük (Identification Friend or Foe).
Tehát a szekunder radar segítségével nemcsak a cél távolságát, oldalszögét, magasságát, valódi sebességét határozhatjuk meg, hanem a célról számtalan kiegészítő adatot is meg tudunk állapítani.
Primer vagy szekunder radar?
A két különböző lokátor típus működésének megismerése, összehasonlítása után joggal merül fel két alapvető kérdés: melyiket használjuk a légicélok felderítésére, valamint szükség van-e mind a kettőre.
A kérdések megválaszolásához figyelembe kell venni, hogy a radarok felderítési zónájában kétféle cél fordulhat elő:
- 1. az egyik válaszol a szekunder radar kérdező jelére, mert fel van szerelve megfelelő válaszadóval;
- 2. a másik nem válaszol, mert:
- a) rendelkezik válaszadóval, de az nem működik,
- b) nem rendelkezik fedélzeti válaszadóval,
- c) nem akar válaszolni.
- Nyilvánvaló, hogy a légiforgalom
irányítás (ATC) és
légtérellenőrzés (ACC) számára is a
fenti második csoportba tartozó célok jelentik a
problémát. A 2a, 2b tulajdonságú
gépek a légiközlekedés szabályait
betartó, jó szándékú repülők,
melyeknél esetenként nemcsak a szabálykövető
magatartást kell ellenőrizni, hanem szükség
esetén segítséget is kell biztosítani. A 2c
csoportba sorolható célok csoportjába tartoznak
azok a gépek, amelyek szándékosan nem
tartják be a légiközlekedés
szabályait, ellenséges szándékkal
repülnek.
A válaszolni nem tudó, vagy nem akaró repülőgépek felderítésének, követésének egyetlen eszköze a primer radar, mivel a válaszjellel ellentétben - a visszavert jel az emberi akarattól független. A légtérellenőrző rendszer számára (de a légiforgalom irányításnak is!) csak akkor létezik egy repülőgép, ha azt valamilyen módon felderítettük!
Mindez azt jelenti, hogy egyidejűleg mindkét radarra szükség van, kizárólag együttes alkalmazása teszi lehetővé a légtérben tartózkodó célok megbízható felderítését, azonosítását és követését.
A radar működése
Mint korábban láthattuk a radar a célok felderítéséhez rövididejű nagyfrekvenciás jeleket (kutató jel) sugároz ki, és két kisugárzás közötti időben veszi a visszaverődött jeleket (3. ábra). A kutató jel időtartama (adási idő) a távolfelderítő lokátorok esetén néhány mikroszekundum, míg a vételi idő 1…2 milliszekundum. A kisugárzott rádiófrekvenciás jel teljesítménye a régebbi radarok esetén 200 kilowatt…1,5megawatt közötti a hatótávolság függvényében. A korszerű lokátorok esetén ez a teljesítmény ugyanolyan hatótávolság mellett jóval kisebb 10watt…100 kilowatt közötti. A kisebb teljesítmény a modern jelfeldolgozási módszerek eredménye.
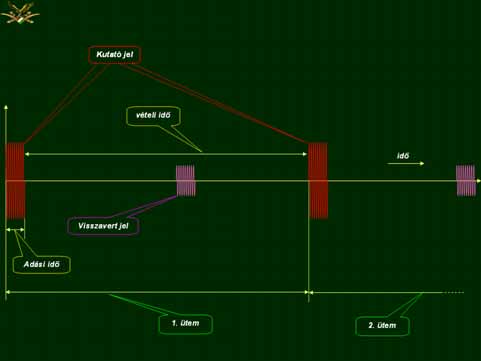
3. ábra
A kutató jelet a jelformáló egység állítja elő (4. ábra), majd az adó felerősíti a szükséges teljesítményre, végül az antenna a meghatározott irányba kisugározza. Az adások közötti szünetekben az antenna által vett jeleket a vevő erősíti fel. A vett jelek teljesítménye a távolság és a cél rádióhullámokat visszaverő tulajdonságától függ. A vett jelek teljesítménye a kisugárzott teljesítmény milliomod és százmilliomod része. A jelfeldolgozás során megtörténik a célokról visszaverődött jelek kiválasztása (detekció), koordinátáik meghatározása, az útvonal adatok előállítása.
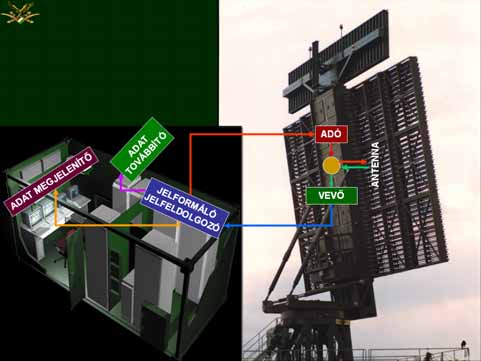
4. ábra
A feldolgozott jeleket megjelenítjük a légtér megfigyeléséhez, a megfelelő üzemmód kiválasztásához, valamint továbbítjuk a légtérellenőrző központba a légihelyzet ábrázolásához. Az 5. ábra egy korszerű megjelenítő eszközön (indikátoron) látható képet mutat.
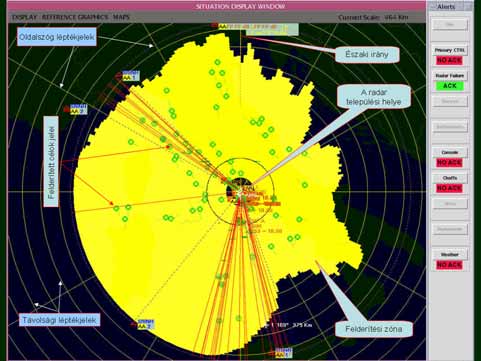
5. ábra
A felderítési zóna méretét, a szögkoordináták mérési pontosságát az antennának az a tulajdonsága határozza meg, hogy mennyire tudja egy adott irányba koncentrálni a kutatójelet. Az egyik lehetséges megoldás (6. ábra) amikor a radar antennája vízszintes síkban élesen irányított (a nyaláb szélessége 1º… 2º), ugyanakkor függőleges síkban kevésbé irányított (a nyaláb szélessége 20º… 45º).
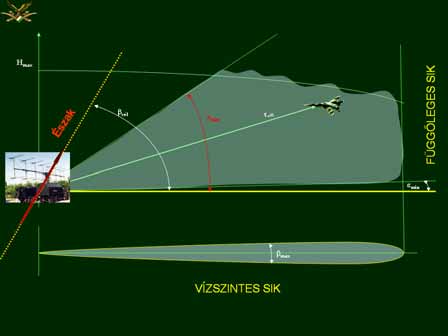
6. ábra
Annak érdekében, hogy a vízszintes síkban 360º-os tartományt tudjunk letapogatni az antenna nyalábot körbe kell forgatni. A felderítő lokátorokban ezt az antenna mechanikus körbe forgatásával érjük el. Az antenna körülfordulási sebessége általában 5-6 fordulat/perc, vagyis ugyanarról a célról 10-12 másodpercenként kaphatunk visszaver jelet. A lokátorral megmérhető a cél oldalszöge, távolsága, de a magassága nem, mivel nem határozható meg az, hogy a függőleges sík mely irányából érkezett vissza a jel (2D radar!).
A másik lehetséges megoldás, amikor az antenna mindkét síkban kis szögtartományba koncentrálja a jeleket (7. ábra).
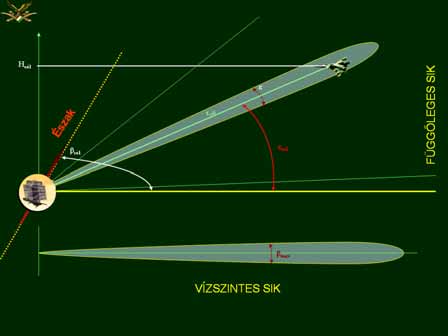
7. ábra
Ilyenkor a nyaláb szélessége mindkét síkban 1º… 2º. Ebben az esetben mindkét síkban pontosan mérhetjük a cél tartózkodási helyét (oldalszög, helyszög), azonban a meghatározott légtér letapogatásához a nyalábot nemcsak a vízszintes síkban, de a függőlegesben is mozgatni kell az adott szögtartományon belül. Az antenna nyaláb vízszintes síkú körbe forgatását – a felderítő lokátorokban - az antenna elektromechanikus mozgatása biztosítja. A függőleges síkú mozgatás két módon oldható meg:
- • az antenna mechanikus mozgatásával, ebben az esetben a cél magassága pontosan meghatározható, azonban a rendszer lassúsága miatt csak két koordináta mérésére van lehetőség: távolság és magasság (2D radar!). Ezeket nevezzük magasságmérő radaroknak.
- • a nyaláb elektronikus mozgatásával, ebben az esetben mindhárom koordináta mérhető (3D radar!).
Az elvek eddigi áttekintése során a különböző környezeti hatásoktól elvonatkoztatva vizsgáltuk a radarokat. Nyilvánvaló azonban, hogy a lokátor működési környezete megváltoztathatja, befolyásolja a radar jellemző paramétereit. A földi telepítésű rádiólokátorok esetén a legjelentősebb hatást a Föld felszíne okozza.
A Föld felszínének hatása a radarra
Ez a hatás annak következménye, hogy a Föld gömbszerű, tehát a földgörbültség hatását figyelembe kell venni, másrészt a domborzatról visszaverődő jelekét is, mert megnehezíthetik a célok felderítését.
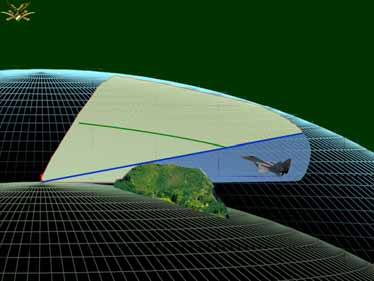
A földgörbültség hatását a 8. ábra szemlélteti. Az ábrán egy Rmax maximális felderítési távolsággal rendelkező radar által „megvilágított” térrész látható a Föld felszíne felett, valamint két különböző magasságon repülő cél pályája a lokátor felderítési zónájában (zöld vonalak).
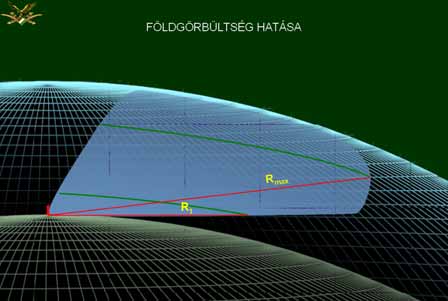
8. ábra
Mivel a rádióhullámok egyenes vonalban terjednek, azaz nem követik a földfelszínt a kisebb magasságon repülő célt csak kisebb távolságon (R1) tudja a lokátor felderíteni. Ez azt jelenti, hogy a radar gyakorlati felderítési távolsága a cél repülési magasságától függ. Természetesen a repülési magasságon kívül a felderítési távolság az antenna magasságának is függvénye. A felderítési távolság cél- és antenna magasságtól való függését a 9. ábra szemlélteti.
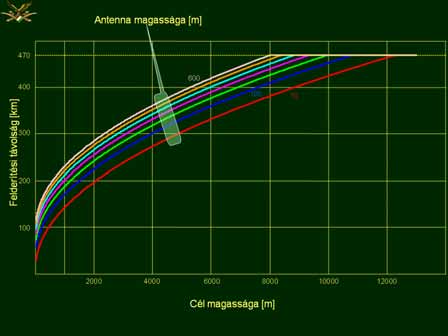
9. ábra
(A számítások a szabványos
légkörre érvényes normális
refrakciót feltételezve készültek.)
Az
ábráról leolvasható, hogy egy 470 km
maximális felderítési távolsággal
bíró rádiólokátor 10 m antenna
magasság esetén csak egy
12 000 m magasan repülő célt tud a maximális
távolságon felderíteni, míg egy 600 m
magasságra telepített radar már a 8 000 m magasan
repülő célt is maximális távolságon
deríti fel. Egy 1 000 m magasságon repülő
célt 10 m antenna magassággal csak 143 km-en, míg
600 m antenna magasság esetén 231 km
távolságon lehet észlelni.
Mindebből az a következtetés vonható le, hogy a hatótávolság az antenna telepítési magasságával – adott cél magasságra - jelentősen növelhető, vagyis kis magasságon repülő célok nagyobb távolságokon történő felderítés csak így lehetséges.
A földfelszíni egyenetlenségek (pl. hegy) hatása abban nyilvánul meg, hogy rajtuk nem hatolnak át a rádióhullámok hanem vissza tükrözik azokat. Annak következtében, hogy a felszíni tereptárgy akadályt képez, torzul az antennanyaláb. Az akadály mögött „radarárnyék” keletkezik (10. ábra).
10. ábra
Ez azt jelenti, hogy a repülési- és antenna magasságok által meghatározott távolságon a lokátor nem tudja felderíteni a célt, mert oda nem jutnak el a rádióhullámok. Ennek eredményeként, az adott települési helyen, adott célmagasság esetén a lehetséges felderítési távolság – melyet a földgörbültsége határoz meg – helyett, tereptől függő távolságokon lehet csak a célt mérni (11. ábra).
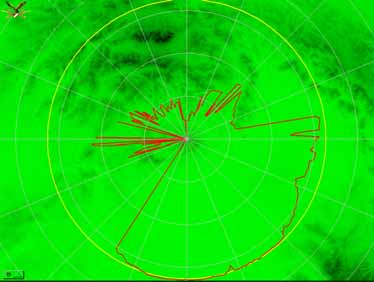
11.
ábra
(A zöld alap egy digitális terep modell
által generált kép, melyen minél
sötétebb a zöld, annál magasabb felszíni
pontot jelöl.)
A számítógépes modell (A modell által generált kép valóságos, de nem valódi radar helyszínre készült!) egy 600 m magasan repülő cél esetére készült. A sárga kör a földgörbültségéből adódó maximális távolságot, a piros vonal a terep által meghatározott távolságot mutatja, körkörösen.
Ugyanerre a települési helyre különböző célmagasságokra (600…1800 m) modellezett felderítési távolságok láthatók a 12. ábrán.
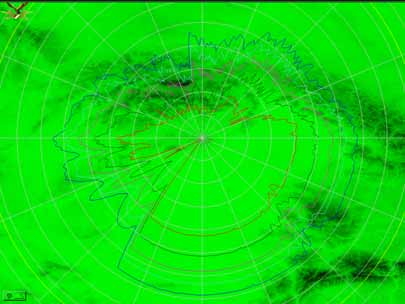
12. ábra
Tehát a domborzat hatására különböző irányokban különböző méretű holt terek, radarárnyékok keletkeznek, melyekben a célok felderítése, követése a radar számára lehetetlen.
Ezen kívül a felszíni visszaverődések – a kis távolság miatt ezek viszonylag nagyszintű jelek – megnehezítik a céljelek észlelését, hatásukat csak korszerű jelfeldolgozási módszerekkel lehet csökkenteni.
Elektronikus zavarás
Katonai radaroknál a felszíni visszaverődések felderítést megnehezítő hatásai mellett számolni kell az ellenséges szándékú elektronikus zavarással is. A szándékos zavar lehet aktív (zavaró rádiófrekvenciás jelek sugárzása a lokátor felé), vagy passzív (mesterségesen előállított reflektáló felhő létrehozása a radar felderítési zónájában).
A zavarok, zavaró jelek megakadályozzák, vagy megnehezítik a céljelek észlelését, az útvonal adatok meghatározását, a cél követését. E hatásokat csak bonyolult és komplex jelfeldolgozási és harcászati megoldásokkal lehet és kell csökkenteni. Ezért valamennyi katonai rádiólokátor – a polgári célú radaroktól eltérően – rendelkezik zavarvédelmi berendezésekkel.
RADARRENDSZER
A légtér megbízható és hatékony védelméhez az ország területe felett olyan radarinformációs teret (RIR) kell létrehozni és fenntartani, hogy az mindenkor tegye lehetővé a levegőben tartózkodó repülő eszközök mozgásának ellenőrzését és folyamatos követését. Ezt oly módon valósítsa meg, hogy a biztonságot veszélyeztető, a légiközlekedés szabályait be nem tartó repülőgépek felderíthetők, egyértelműen azonosíthatóak legyenek, és ellenük a törvényekben, utasításokban, szabályzatokban meghatározott eljárásokhoz a légvédelem számára a megfelelő információt adjon.
Egyetlen radar ilyen információs teret az ország területe felett nem képes létrehozni. Ezért különböző helyen telepített és üzemeltetett, különböző típusú radarokból álló rendszerre van szükség. A radarinformációs tér kialakításához először meg kell határozni annak méretét:
- • a minimális és maximális magasságot, amelyek között valamennyi repülőgépről adatokkal kell rendelkezni;
- • az
országhatárokhoz viszonyítva a
kiterjedését, az információs tér,
azaz a határhoz viszonyítva a felderítési
távolságát.
Általában az információs tér jellemzőit külön határozzuk meg béke és háborús helyzetre vonatkozóan. Ezen kívül figyelembe kell venni azt is, hogy a RIR fenntartásában a nemzeti követelmények mellett szövetségi kötelezettségeink is vannak.
A RIR méretét meghatározó jellemzők közül a maximális magasságra vonatkozó követelmény megadása a legegyszerűbb feladat, mert a nagy repülési magasságokon az összefüggő tér kialakul akkor, ha az kis magasságokon már biztosított.
A radarinformációs tér alsó határának megállapításához figyelembe kell venni, hogy a jelenlegi helyzetben milyen nemzetbiztonsági kockázatot jelenthet a különböző magasságokon zajló légiforgalom, és milyen lehetőségek vannak a jelentős mértékben meg növekedett kismagasságú repülések ellenőrzésére.
A határokhoz viszonyított távolság kérdésében számításba kell venni azt a tényt, hogy minél távolabb derítjük fel a célt, annál több időnk van az azonosításra, az esetlegesen szükségessé váló ellenintézkedések megtételére. A béke időszakra vonatkozó azonosítási eljárás egyes szakaszait, valamint az azokban megoldandó feladatokat a 12. ábra vázlatosan szemlélteti.
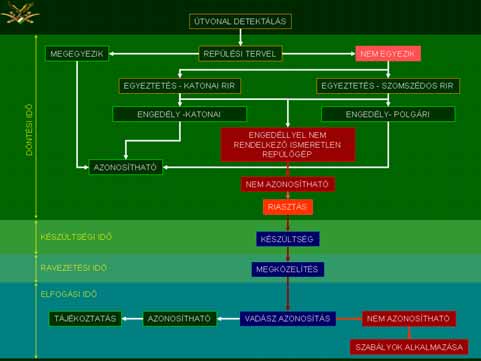
(Az ábrán az időintervallumok nem a valóságos tevékenységhez rendelt időt mutatják, méretüket rajztechnikai megfontolások alakították ki.)
Belátható, hogy a nem azonosítható, esetlegesen veszélyt jelentő repülőgép ellen a törvényekben, utasításokban, szabályokban előírt feladatok végrehajtásához időre van szükség. Ez a teljes, összegzett idő a következő összetevőkből áll:
- • döntési idő: az eljárási rend alapján a követelményekben pontosan meghatározott idő;
- • készültségi idő: a szövetségi- és nemzeti követelményeknek megfelelően meghatározott időtartam, mely a vadászgép felszállásáig tart;
- • rávezetési idő: a cél és a vadászgép helyzete - a megközelítés megkezdésekor – közötti távolság, valamint az elfogó sebességének függvénye;
- • végrehajtási idő: az adott helyzetben megoldandó feladathoz szükséges idő.
A teljes
idő, valamint a cél sebessége alapján
határozható meg a felderítés
szükséges távolsága . Ahhoz, hogy az
elfogó vadász feladatát végre tudja hajtani
legalább ekkora távolságról adatokat kell
szolgáltatni a célról (14. ábra).
Amennyiben ezen a távolságon nem tudjuk a célt
felderíteni, illetve a teljes idő alatt (teljes
távolságon) nem tudjuk a célt és a
vadászt folyamatosan követni, akkor a feladatot nem lehet
végrehajtani. 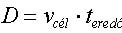
14. ábra
A radarinformációs tér szükséges mérete alapján a rendelkezésre álló radarok jellemzőinek, a földfelszín hatásainak ismeretében meghatározható az alkalmazandó lokátorok mennyisége települési helyekkel együtt. A rendszer zavarállóságának javítása érdekében célszerű különböző frekvenciákon üzemelő rádiólokátorokat alkalmazni.
A FÖLDFELSZÍN FÖLÖTT TELEPÍTETT RADAROK
Mint korábban a földgörbültség hatásának elemzésekor láthattuk, a felderítő radar telepítési magasságának növelésével jelentősen megnő a kis magasságokon repülő gépek felderítési távolsága. Amennyiben a radart nem a földfelszínen telepítjük a földgörbültség, ill. a domborzat hatása a felderítési távolságra elhanyagolhatóvá válik.
Az egyik lehetséges megoldás a felderítő lokátor repülőgépre telepítése. Ilyen megoldás például az E-3A AWACS (Airborne Warning and Control System), mely egy Boeing-707 repülőgépre szerelt nagy-hatótávolságú radar. Hatótávolsága 9150 m repülési magasságról kis magasságokon repülő célokra 400 km. A repülőgépet a levegőben - feladat teljesítés közben – 4 fős repülő és 13 fős radar személyzetből álló csoport működteti. A gép utántöltés nélkül mintegy 10 órát tud a levegőben maradni. (Az adatok a http://www.e3a.nato.int honlapról származnak.)
Ezeket az adatokat figyelembe véve azt mondhatnánk, hogy az ország területe fölött egyetlen ilyen radar is képes lenne radarinformációs teret kialakítani. Ez azonban csak felületes következtetés. Ugyanis ezek a gépek sem képesek állandóan a levegőben tartózkodni. A személyzetet cserélni kell, a gépnek karbantartásra, javításra van szükségük. Az esetleges légi üzemanyag ellátáshoz légi utántöltő repülőgépeket kell biztosítani. Az oltalmazásukhoz vadászgépeket kell készültségben tartani. Egyszerűen belátható, hogy egy ilyen rendszer üzemeltetése igencsak költséges. Nem véletlen, hogy azok az országok, amelyek rendelkeznek ilyen eszközökkel azok is csak háborús, vagy konfliktus helyzetben alkalmazzák. Békeidőben a légtérellenőrzés feladatát mindenütt földi telepítésű radarokkal oldják meg.
Második magasság növelési lehetőség a felderítő radar világűrbe való telepítése. Erre az elmúlt időszakban, mint reális lehetőségre többen hivatkoztak is. Valóban léteznek űrradarok, melyek jelenleg képesek a Föld felszínéről megfelelő felbontású képeket készíteni. A gyakorlatban elérhető felbontás mértéke kb. 1…2 m (A jelenleg is alkalmazott katonai műholdas képalkotó radarok valódi felbontóképessége szigorú titok.), ami azt jelenti, hogy csak ennél nagyobb kiterjedésű tárgyak különböztethetők meg a képeken.
Bár az űrbe telepített radarok egyaránt hasznos adatokat szolgáltatnak katonai és polgári feladatok megoldásához, jelenleg nem helyettesíthetik a légtérellenőrzés, légiforgalom irányítás földi telepítésű radarjait. Ugyanis nem képesek a földi légkörben gyorsan mozgó merev- és forgószárnyas repülőgépek észlelésére, pályájuk követésére, azonosításukra. Ennek oka az, hogy a földfelszínről visszaverődő nagy radarjelek hátterében nagyon nehéz folyamatosan észlelni a gyorsan mozgó célról visszaverődő nagyságrendekkel kisebb jelet. Gondot jelent a műholdak pályáján (alacsony, vagy magas) szükséges fedélzeti adóteljesítmény előállítása is.
A 2002-ben beindított, mintegy 34 milliárd dollár összköltséggel tervezett USA űrradar (SBR, vagy SR) programban (rendszerbeállítását ma már 2015-re tervezik) sem irányozták elő a légicélok felderítési képességének elérését. Ezt nyilatkozta az SBR program egyik vezetője is (John A. Tirpak: The Space Based Radar Plan. Air Force Magazine, August 2002 Vol. 85, No. 08).
Nyílvánvalóan adódik a következtetés, hogy az űrradar napjainkban nem reális alternatíva, közeljővőben történő kifejlesztése, rendszerbeállítása, alkalmazása messze túlhaladja Magyarország gazdasági lehetőségeit.
Összefoglalva megállapítható tehát, hogy a földi telepítésű lokátorok nem válthatók ki sem levegőben, sem űrben telepített radarokkal.
ÖSSZEGZÉS
A hazai radarrendszer békeidőben is egyidejűleg része a nemzeti légvédelmi rendszernek, és a NATO integrált légvédelmi rendszerének. A légtérellenőrzés alapvető érzékelő és mérő berendezései a nagy-hatótávolságú, állandó települési helyű radarok, melyeket kiegészítenek a kis magasságon felderítő, különböző frekvenciájú, mobil lokátorok. Ezek együttesen hozzák létre a nemzeti és szövetségi követelményekben meghatározott méretű radarinformációs teret.
Az Európai Uniós határok (zöldhatárok) őrizetében szükségessé válhat olyan mobil radarok rendszerbe állítása is, melyek képesek emberek, gépjárművek, kismagasságon repülő lassú légi járművek felderítésére, követésére. Ez a rendszer információival kiegészítheti, „kitágíthatja” a radarinformációs teret.
A légtérellenőrző rendszer
fenntartása, fejlesztése fontos nemzetbiztonsági
és honvédelmi feladat.
**************************
Egykor tanulta s nem feledte,
most csak felrakta, hogy más se felejtse.
-=SUSZTER=-